-
A vector spaces is a set of vectors
-
Addition and Scalar multiplication can be used!
-
Vector spaces can be anything, vectors, polynomials, functions
-
If I have two polynomials of the first degree ,
u = x + 1andv = 2x - 3, they both share the same vector space, because they are same degree -
If I add the polynomials
u = x + 1andv = 2x - 3together, I getuv = 3x - 2 -
The resulting
uv = 3x - 2is also a polynomial of degree one, so we’re still in that original vector space! -
The same is true if I multiplied
u = x + 1by 5. I would get5u = 5x +5.5uis still a polynomial of degree one, so we’re still in that first degree polynomial space!
—
- The same is true of I have the two matrices
and
- If I add and
v̂, I getû + v̂
- This results in a 2D vector, meaning that we are staying in the same 2D vector space.
5ûwould result in the same thing, another 2D vector. We’re good here.
—
These are known as the properties of closure.
-
Given
ûεV (ûis a vector in the vector space V) and scalarC, thenCûε V (The multiplied scalar will also be in vector space V) -
Given
ûεV andv̂εV , thenû + v̂ϵ V (The new added vector is also in vector space V!)
The dimension of the vector is usually noted by ℝn. The amount of non zero rows in a vector will give you that.
—
What are Axioms? What are the 8 Axioms?
Axioms are a bunch of rules which hold true inside of a vector space. There are 10 of which hold true in any vector space V
With vectors û, v̂ and ŵ, and scalars a and b
Addition
-
û + v̂=v̂ + ûThis is known as the commutative property of addition! -
û + (v̂ + ŵ)=(û + v̂) + ŵThis is known as the associative property -
û + 0 = û + 0There is a zero vector. This is known as the additive identity -
û + û'For every vector in a vector space, there is another vector that can bring it back to zero. This property is known as the additive inverse! Multiplication -
For ûϵ**V*
1û = uFor every single vector in the vector space V, 1* û will equal û. This is known as the multiplicative identity -
a * (bu) = (ab) * uThis property does not seem to have a name, but is used to combine scalars. Scalars can be combined as such. -
(a + b)u = au + buThis is known as distributivity of scalar multiplication with respect to field addition. Vectors can distribute like this! -
a(u+v) = au + avThis is known as distributivity of scalar multiplication with respect to vector addition. Just like the last property, this works as well!
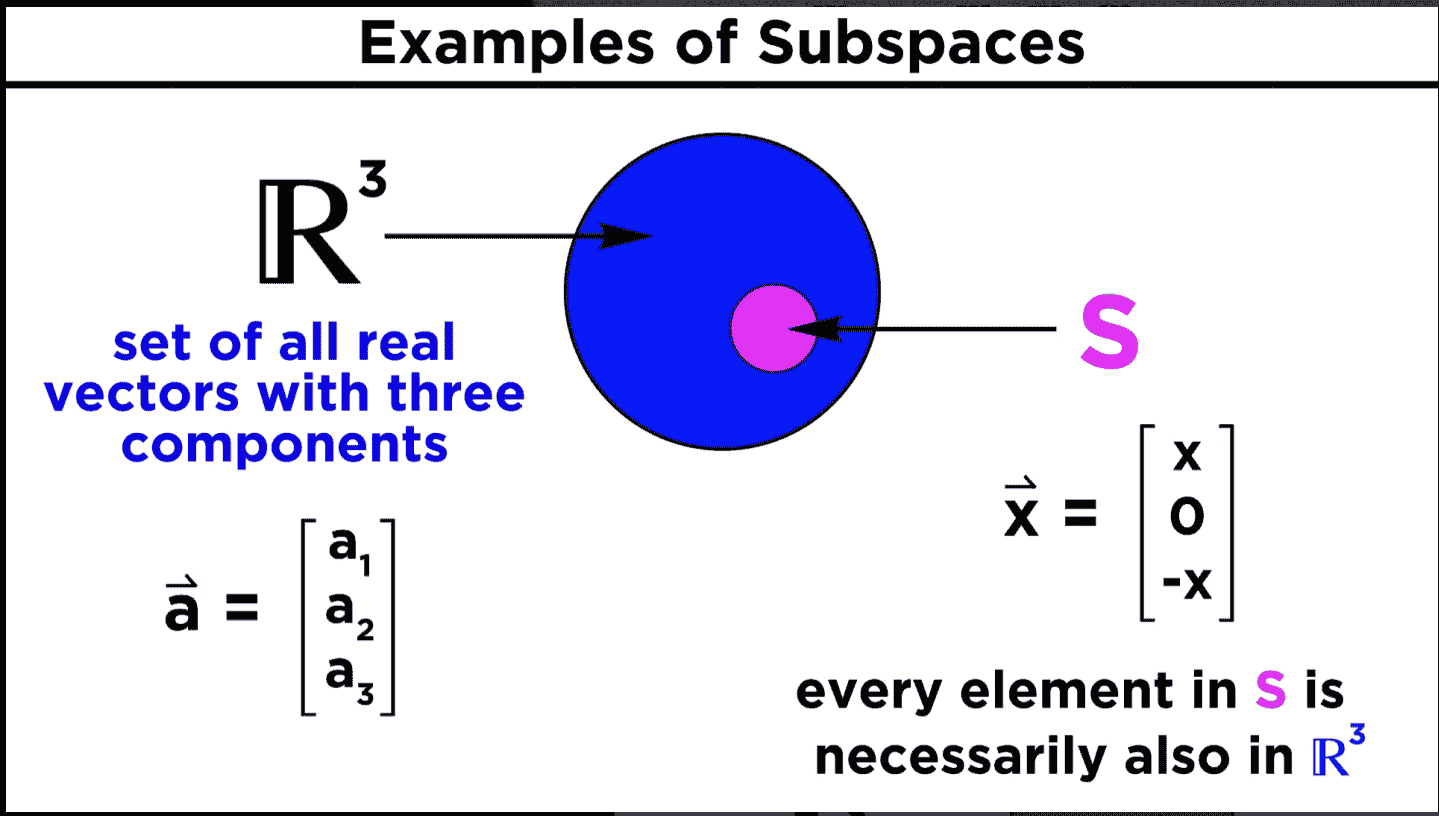
Vector Subspaces
-
Vector Subspaces are, you guessed it, a vector space inside of another vector space.
-
If there is a subspace S inside of a vector space V, the subspace S must follow all of V’s rules.
-
The earlier Addition and Scalar multiplication rules ([properties of closure](Final Linear Algebra Review)) can be used to ensure conformance to the new subspace
Plane in a Three-Dimensional Space
- If you know that you have a plane in a 3D space, you DON’T know that it immediately is a subspace.
- This is because of the possibility of having a scalar of “0” creating a “zero vector”.
- If you know that the plane passes through (0,0,0), you’re good, because that condition works.
- If you don’t know that it passes through the origin (0,0,0), you don’t have enough information to determine whether the plane is a subspace of the 3D space.
Null Space
- Null Space is a situation to where all of the vectors in AX=B, are AX=0
- Null Space is noted by N(A) (A being the matrix)
- This occurs when you have a A matrix, transformed by an “X vector” to make it equal to zero.
To solve for the X’s which make B=0, we can set up a homogenous solution with matrix augmentation.
- Do REF, or RREF, and solve for the unknown X’s! (keep in mind, this matrix is just:
)
A weird thing to think about, is that the null space is actually a subspace of A! It meets all of the criteria!
- What is happening, is that the subspace is being crushed into zero by a transformation, and becomes a zero vector